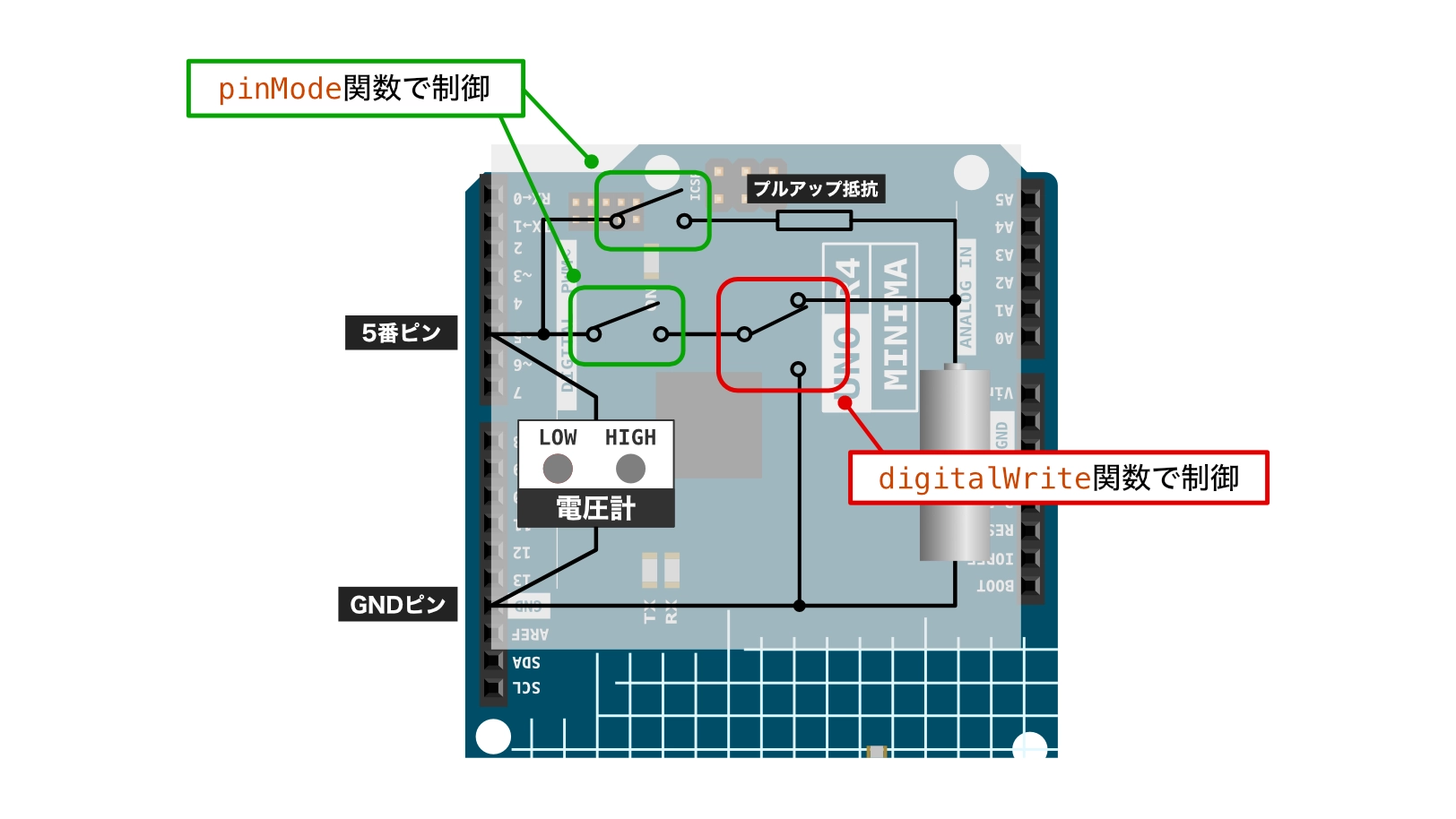
動作
Arduinoボードのピンの入出力モードを以下のいずれかに設定します。
| モード | 内容 |
|---|
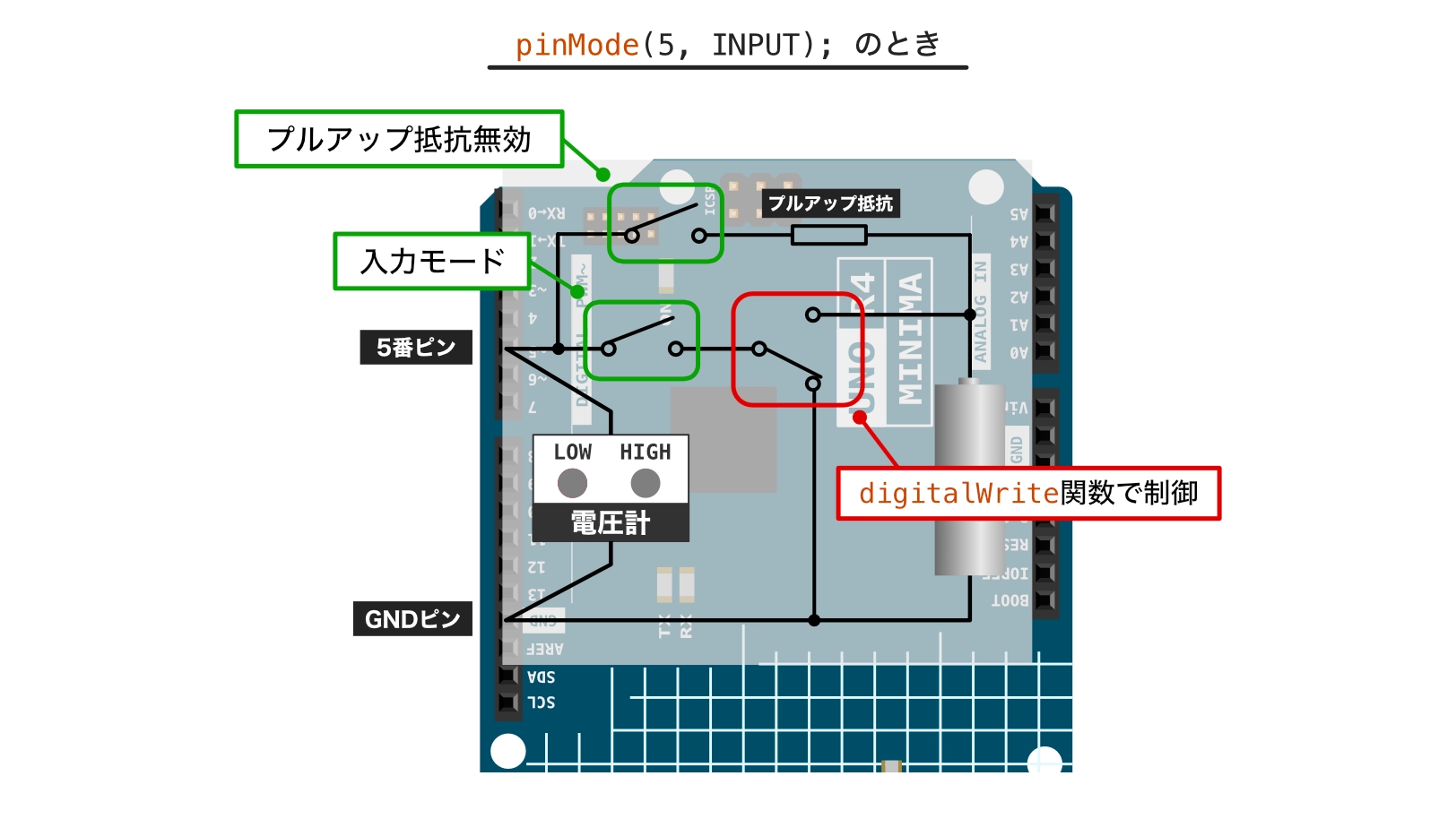
| 入力モード・プルアップなし(デフォルト) | ピンの電圧を読み取るモード
内部プルアップ抵抗は無効 |
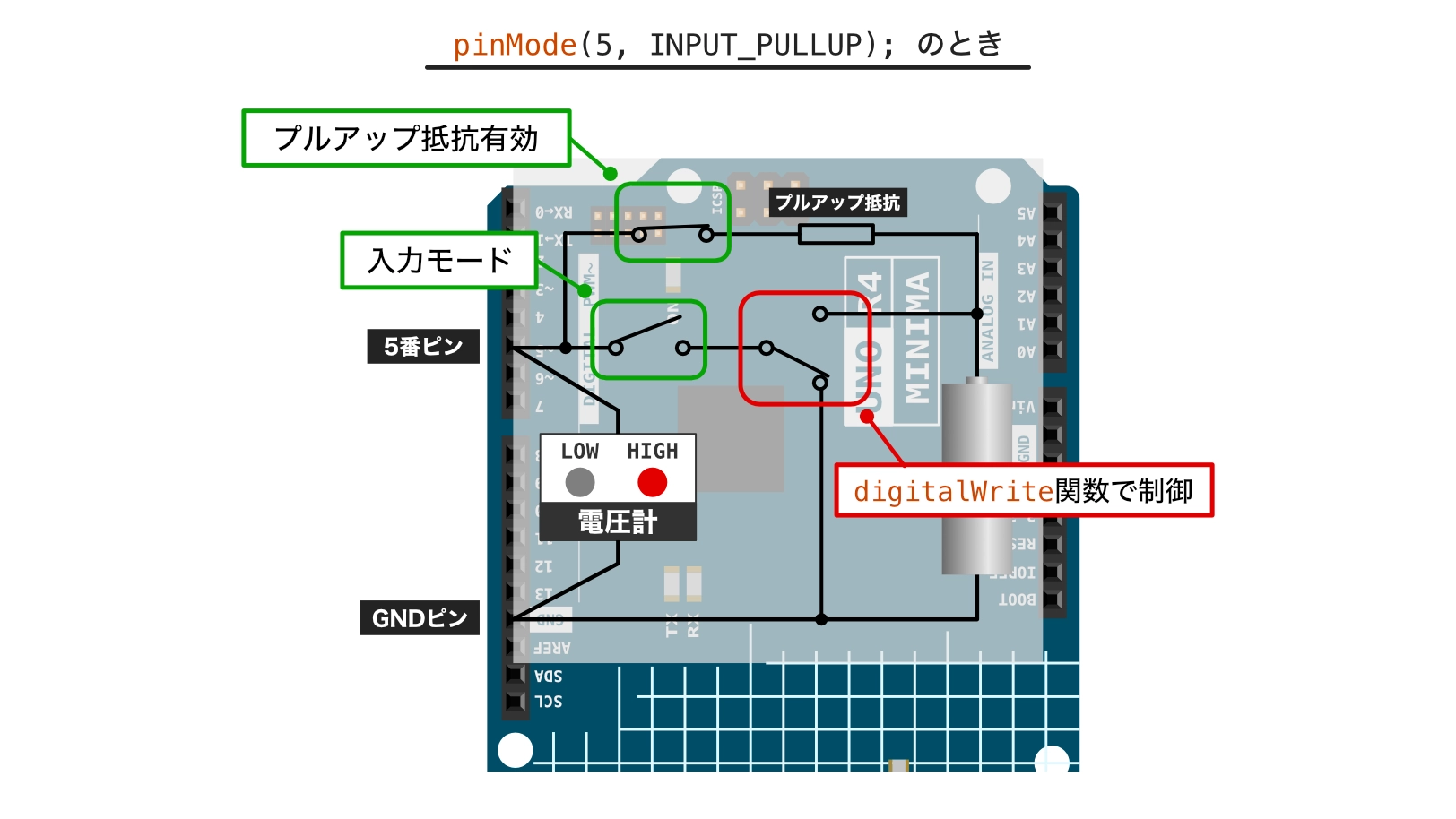
| 入力モード・プルアップあり | ピンの電圧を読み取るモード
内部プルアップ抵抗は有効 |
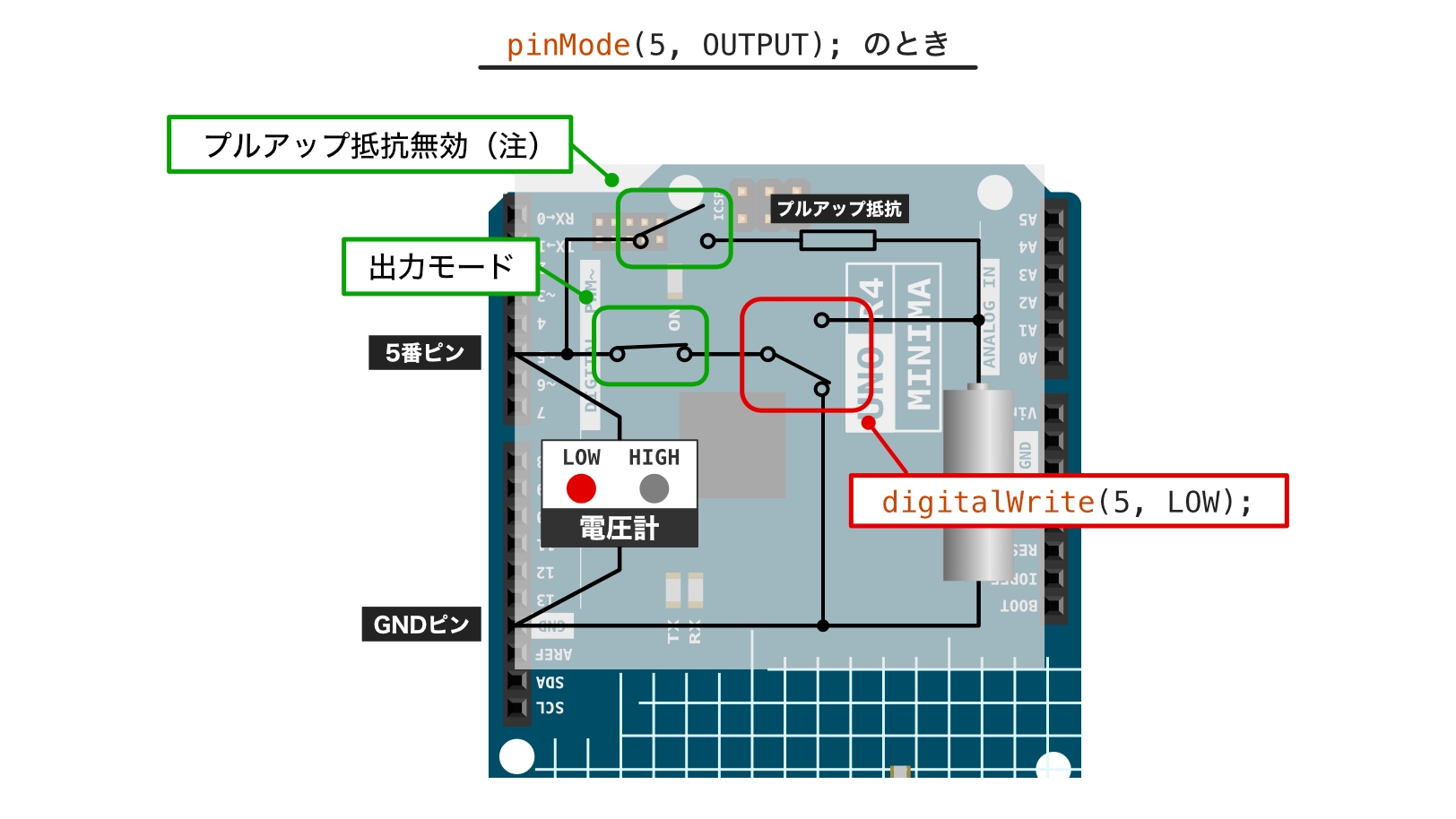
| 出力モード | ピンの電圧を制御するモード |
入力モード設定時は、digitalRead関数やanalogRead関数でピンの電圧を読み取ることができます。入力モード設定は、内部プルアップ抵抗の有効・無効設定も可能です。
出力モード設定時は、digitalWritre関数、analogWrite関数、tone関数などでピンの電圧を制御することができます。
pinMode関数でモードを指定しない場合、デフォルトは「入力モード・プルアップなし」になります。
書式
| 引数 | pin | 入出力モードを設定するピンを指定します。
ピン番号(10など)やピン名(A5)で指定します。 |
mode | INPUT:入力・プルアップなし(デフォルト)
INPUT_PULLUP:入力・プルアップあり
OUTPUT:出力 |
| 戻り値 | なし |
使用例
次のコードにより、指定したピンの入出力モードを設定します。
pinMode(10, INPUT_PULLUP); // 10番ピンをプルアップ付きの入力モードに設定
pinMode(A5, OUTPUT); // A5ピンを出力モードに設定
サンプルスケッチ
3番ピンに接続したスイッチの状態を読み取り、スイッチが押されたことを検知したら5番ピンに接続したLEDを1秒間点灯するスケッチです。
 ボタンをクリックするとシミュレーターが動作します。スケッチを変更することもできます。変更した場合、シミュレーションを一度 ボタンをクリックして停止してから再度シミュレーターを開始してください。
ボタンをクリックするとシミュレーターが動作します。スケッチを変更することもできます。変更した場合、シミュレーションを一度 ボタンをクリックして停止してから再度シミュレーターを開始してください。