LCDモジュールの制御方法を確認しましたので、BME280で取得した温湿度・気圧データをLCDモジュールに表示するプログラムを作成します。
プログラム作成部分
前回までの記事で、次のプログラムを作成してきました。
- BME280から温湿度・気圧データを取得するプログラム
- LCDモジュールの任意の位置に文字を表示するプログラム
これらのプログラムは別々に作成してあります。
今回作成するプログラムでは、BME280から取得したデータをLCDモジュールに表示する、という処理にまとめたいと思います。
最初に、データをLCDモジュールに表示する部分を確認しておきましょう!
データ表示プログラム
BME280で取得した温湿度・気圧の補正済みデータは次の変数に入っています。
// 実際の温湿度
float actual_temp;
float actual_hum;
float actual_press;float型の変数ですので、printf文では%fフォーマットで表示すればOKです。
温湿度と気圧データの表示方法についてそれぞれ確認します。
温度データ表示
温度データのフォーマットは、例えば「24.78℃」と表示したいところですが、LCDモジュールの表示可能文字表を見ると「℃」の文字はありません。
そこで次のようにに、カタカナの半濁点と「C」を表示することにしました。
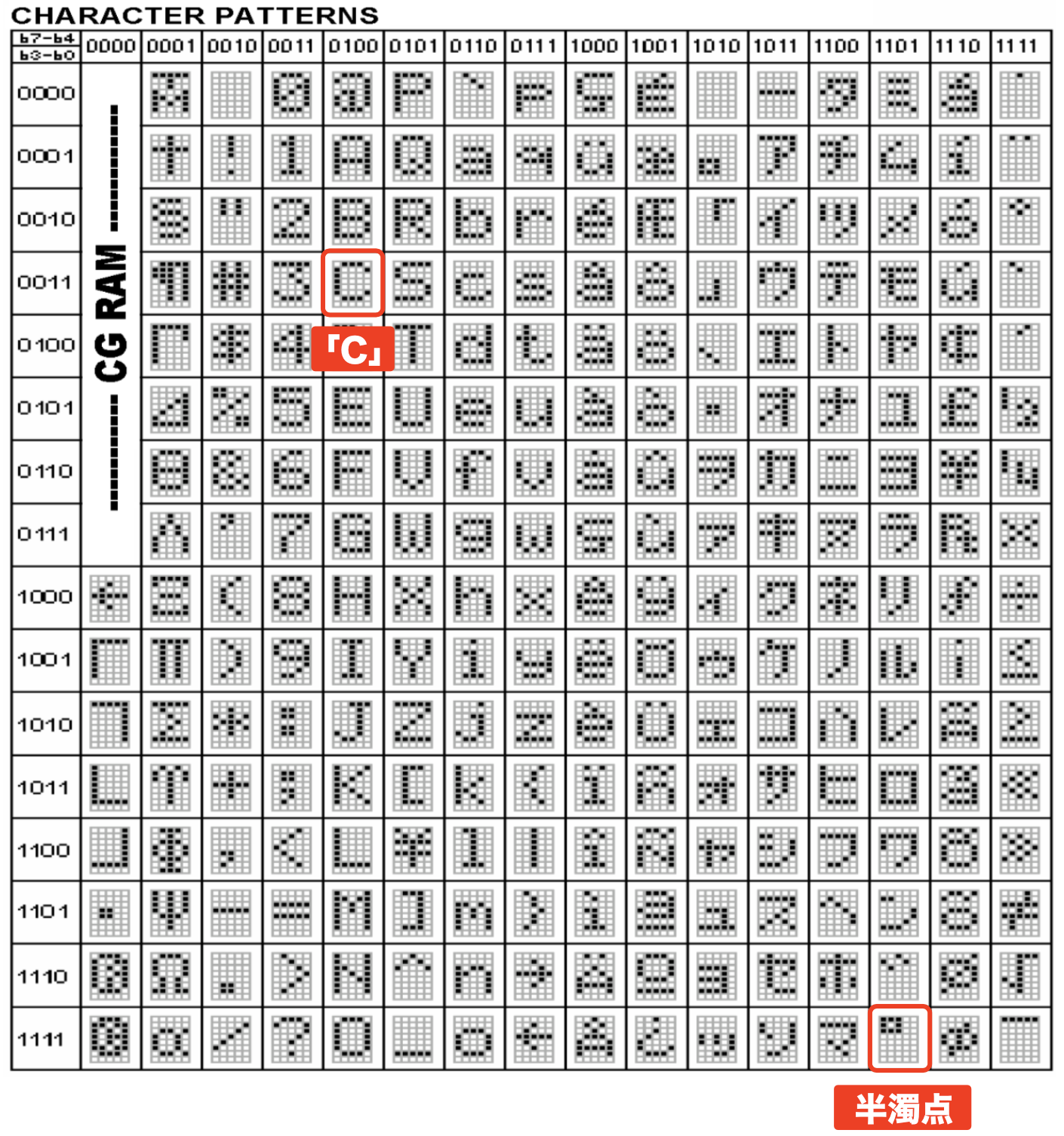
Cの文字はASCII文字ですので、lcdSendCharacterData('C');と書けます。
半濁点はASCII文字ではありませんので、直接半濁点のコード0xdfをlcdSendCharacterData(0xdf);と書くことにしました。
気温データはprintf("%f5.2", actual_temp);で表示します。
温度データ表示の処理をまとめると次のようになります。
// 温度を表示
printf("%5.2f", actual_temp);
lcdSendCharacterData(0xdf);
lcdSendCharacterData('C');湿度データ表示
湿度データは、小数点以下の数字はあまり意味がなさそうなので表示はしないことにしました。(データ自体はfloatですので、表示しても問題ありません)
0〜100%表示で3桁になりますので、次のようにしてみました。
// 湿度を表示
printf(" %3.0f%%", actual_hum);「%」記号を表示するには%%と書く点に注意ですね。
気圧データ表示
気圧データはちょっとした変化を確認したいため、少数第二位まで表示してみます。
単位は「hPa」(ヘクトパスカル)ですので、次のように表示します。
// 表示位置を2行目の先頭に移動
lcdLocateCursor(0, 1);
printf("%7.2fhPa", actual_press);温湿度・気圧データ表示プログラム
ここまでの内容をプログラムに追加すれば、BME280で取得した温湿度・気圧データの表示ができます。
なお、温度データについては実際より数度高く表示されると思います。これは第28回の記事で説明しましたが、湿度と気圧データ補正用の内部回路の温度のためです。
温度データは別に接続したI2C温度センサの方が正確ですので、次回からI2C通信で温度センサの値を読み取るプログラムを作成します。
次のプログラムは、BME280から温湿度・気圧データを取得してLCDモジュールに表示する、という内容です。
なお、LCDに表示されている内容はそれほど変化しないので、動いてる感を出すためにLEDの点滅制御もしています。この辺りは好みの応じて変更してみてください。
/*
* BME280温湿度大気圧センサー
* AQM1602LCDモジュール
* 制御プログラム
*/
//
// PIC16F18857コンィグレーション設定
//
// CONFIG1
#pragma config FEXTOSC = OFF // External Oscillator mode selection bits (Oscillator not enabled)
#pragma config RSTOSC = HFINT1 // Power-up default value for COSC bits (HFINTOSC (1MHz))
#pragma config CLKOUTEN = OFF // Clock Out Enable bit (CLKOUT function is disabled; i/o or oscillator function on OSC2)
#pragma config CSWEN = ON // Clock Switch Enable bit (Writing to NOSC and NDIV is allowed)
#pragma config FCMEN = ON // Fail-Safe Clock Monitor Enable bit (FSCM timer enabled)
//
// CONFIG2
#pragma config MCLRE = OFF // Master Clear Enable bit (IO)
#pragma config PWRTE = ON // Power-up Timer Enable bit (PWRT enabled)
#pragma config LPBOREN = OFF // Low-Power BOR enable bit (ULPBOR disabled)
#pragma config BOREN = ON // Brown-out reset enable bits (Brown-out Reset Enabled, SBOREN bit is ignored)
#pragma config BORV = LO // Brown-out Reset Voltage Selection (Brown-out Reset Voltage (VBOR) set to 1.9V on LF, and 2.45V on F Devices)
#pragma config ZCD = OFF // Zero-cross detect disable (Zero-cross detect circuit is disabled at POR.)
#pragma config PPS1WAY = ON // Peripheral Pin Select one-way control (The PPSLOCK bit can be cleared and set only once in software)
#pragma config STVREN = ON // Stack Overflow/Underflow Reset Enable bit (Stack Overflow or Underflow will cause a reset)
//
// CONFIG3
#pragma config WDTCPS = WDTCPS_31// WDT Period Select bits (Divider ratio 1:65536; software control of WDTPS)
#pragma config WDTE = OFF // WDT operating mode (WDT Disabled, SWDTEN is ignored)
#pragma config WDTCWS = WDTCWS_7// WDT Window Select bits (window always open (100%); software control; keyed access not required)
#pragma config WDTCCS = SC // WDT input clock selector (Software Control)
//
// CONFIG4
#pragma config WRT = OFF // UserNVM self-write protection bits (Write protection off)
#pragma config SCANE = available// Scanner Enable bit (Scanner module is available for use)
#pragma config LVP = ON // Low Voltage Programming Enable bit (Low Voltage programming enabled. MCLR/Vpp pin function is MCLR.)
//
// CONFIG5
#pragma config CP = OFF // UserNVM Program memory code protection bit (Program Memory code protection disabled)
#pragma config CPD = OFF // DataNVM code protection bit (Data EEPROM code protection disabled)
// ----- ヘッダファイル -----
#include <xc.h>
#include <stdint.h>
#include <stdio.h> // printfを使用するため、stdio.hをインクルード
// ----- 定数 -----
// I2C Ack/Nack定義
#define I2C_ACK 0x00
#define I2C_NACK 0xff
// LCDモジュール
#define LCD_I2C_ADDRESS 0x7c // LCDモジュールのI2Cアドレス
// SPIピン設定
#define SPI_SCK LATCbits.LATC7
#define SPI_MISO PORTCbits.RC6
#define SPI_MOSI LATCbits.LATC5
#define SPI_CSB LATCbits.LATC4
// ----- 関数プロトタイプ宣言 -----
// LCDモジュール表示制御関数
void lcdInitialize(void); // LCD初期化
void lcdClearDisplay(void); // ディスプレイ全消去
void lcdSendCommandData(uint8_t); // コマンド送信
void lcdSendCharacterData(uint8_t); // 1文字表示
void lcdSendString(char *); // 文字列表示
void lcdLocateCursor(uint8_t,uint8_t); // カーソル位置指定
// LCDモジュールI2Cプロトコル関数
void lcdI2CProtocol(uint8_t, uint8_t, uint8_t);
// I2Cプロトコル各信号の生成関数
void i2cProtocolStart(void); // スタートビット生成
void i2cProtocolStop(void); // ストップビット生成
void i2cProtocolSendData(uint8_t); // 1バイトデータ送信
uint8_t i2cProtocolReceiveData(void); // バイトデータ受信
uint8_t i2cProtocolCheckAck(void); // ACK信号チェック
// BME280センサー制御
void bme280Initialization(void); // BME280の初期化
void bme280ForcedMeasurement(void); // 温湿度・気圧データの測定指示
void bme280ReadTrimmingParameters(void); // 補正データの読み取り
void bme280ReadMeasuredRawData(void); // 補正前の温湿度・気圧データ読み取り
int32_t bme280CompensateTemperature(void); // 温度データ補正
uint32_t bme280CompensatePressure(void); // 気圧データ補正
uint32_t bme280CompensateHumidity(void); // 湿度データ補正
// SPI通信制御関数
uint16_t spiRead2BytesData(uint8_t address);
uint8_t spiRead1ByteData(uint8_t address);
void spiWrite1ByteData(uint8_t address, uint8_t data);
void spiSend8bit(uint8_t data);
uint8_t spiReceive8bit();
// ----- クロック周波数 -----
#define _XTAL_FREQ 4000000
// ----- グローバル変数 -----
// BME280温湿度・気圧読み取りデータ
uint32_t hum_raw, temp_raw, pres_raw;
int32_t t_fine;
// BME280気温補正データ
uint16_t dig_T1;
int16_t dig_T2;
int16_t dig_T3;
// BME280湿度補正データ
uint8_t dig_H1;
int16_t dig_H2;
uint8_t dig_H3;
int16_t dig_H4;
int16_t dig_H5;
int8_t dig_H6;
// BME280気圧補正データ
uint16_t dig_P1;
int16_t dig_P2;
int16_t dig_P3;
int16_t dig_P4;
int16_t dig_P5;
int16_t dig_P6;
int16_t dig_P7;
int16_t dig_P8;
int16_t dig_P9;
//
// main関数
//
void main(void) {
// 動作周波数設定
OSCCON1bits.NDIV = 0b0000; // 分周1:1
OSCFRQbits.HFFRQ = 0b010; // 4MHz
// ピン属性設定
ANSELA = 0b00000000;
ANSELB = 0b00000000;
ANSELC = 0b00000000;
TRISA = 0b00000000;
TRISB = 0b00000000;
TRISC = 0b01001100;
// SPI信号線初期設定
SPI_SCK = 0; // クロックを0
SPI_MOSI = 0; // ホスト->デバイスのデータを0
SPI_CSB = 1; // チップセレクトを1(=無効)
// ----- I2C通信ピンのPPS設定 ------
// 設定ロック解除
PPSLOCK = 0x55;
PPSLOCK = 0xAA;
PPSLOCKbits.PPSLOCKED = 0x00;
// SCL, SDAピンの割り当て
SSP1DATPPS = 0x12; // RC2をMSSP1:SDA1に設定
SSP1CLKPPS = 0x13; // RC3をMSSP1:SCL1に設定
RC3PPS = 0x14; // RC3をMSSP1:SCL1に設定
RC2PPS = 0x15; // RC2をMSSP1:SDA1に設定
// 設定ロック
PPSLOCK = 0x55;
PPSLOCK = 0xAA;
PPSLOCKbits.PPSLOCKED = 0x01;
// ----- I2C通信設定 ------
// SMP Standard Speed; CKE disabled;
SSP1STAT = 0x80;
// SSPEN enabled; CKP Idle:Low, Active:High; SSPM FOSC/4_SSPxADD_I2C;
SSP1CON1 = 0x28;
// SBCDE disabled; BOEN disabled; SCIE disabled; PCIE disabled; DHEN disabled; SDAHT 300ns; AHEN disabled;
SSP1CON3 = 0x00;
// Baud Rate Generator = 100kHz
SSP1ADD = 0x09;
// LCDモジュール電源安定化時間待ち
__delay_ms(100);
// LCD初期化
lcdInitialize();
// LCD表示クリア
lcdClearDisplay();
// BME280初期化
// コントロールレジスタ、補正係数取得
bme280Initialization();
// 実際の温湿度
float actual_temp;
float actual_hum;
float actual_press;
// 補正データ
int32_t compensated_temp;
uint32_t compensated_hum;
uint32_t compensated_press;
while(1){
// SPI通信で温湿度センサの値を取得
bme280ForcedMeasurement();
bme280ReadMeasuredRawData();
// 取得したデータをキャリブレーション
compensated_temp = bme280CompensateTemperature();
compensated_hum = bme280CompensateHumidity();
compensated_press = bme280CompensatePressure();
// 実際の温湿度に変換
actual_temp = (float)compensated_temp / 100.0;
actual_hum = (float)compensated_hum / 1024.0;
actual_press = (float)compensated_press / 100.0;
// 取得したデータを液晶ディスプレイに表示
// 文字表示位置を左上に移動
lcdLocateCursor(0, 0);
// 温度を表示
printf("%5.2f", actual_temp);
lcdSendCharacterData(0xdf);
lcdSendCharacterData('C');
// 湿度を表示
printf(" %3.0f%%", actual_hum);
// 表示位置を2行目の先頭に移動
lcdLocateCursor(0, 1);
printf("%7.2fhPa", actual_press);
// とりあえずLEDをON_OFF制御
LATBbits.LATB0 = 1;
LATBbits.LATB1 = 1;
__delay_ms(1000);
LATBbits.LATB0 = 0;
LATBbits.LATB1 = 0;
__delay_ms(1000);
}
}
//
// LCD制御関数
//
//
// printfの文字出力関数定義
//
void putch(char character) {
lcdSendCharacterData(character);
return;
}
//
// LCDモジュールに制御コードまたはデータを送信
//
void lcdI2CProtocol(uint8_t address, uint8_t control_code, uint8_t data) {
i2cProtocolStart(); // スタートコンディション
i2cProtocolSendData(address); // アドレス送信
i2cProtocolSendData(control_code); // 制御コード送信 (動作設定=0x00/文字表示=0x40)
i2cProtocolSendData(data); // データ送信
i2cProtocolStop(); // ストップコンディション
return;
}
//
// 表示文字データ送信
// 0x40の後にデータを送信
void lcdSendCharacterData(uint8_t data){
// 表示文字のデータを送信する場合の制御コードは0x40
lcdI2CProtocol(LCD_I2C_ADDRESS, 0x40, data);
// ウエイト
// 文字表示の場合はウエイトは必要なくても動作しているが
// 表示されない場合は1ms程度のウエイトを入れる
// __delay_ms(1);
return;
}
//
// コマンド送信
// 0x00の後にコマンドを送信
//
void lcdSendCommandData(uint8_t command){
// コマンドを送信する場合の制御コードは0x00
lcdI2CProtocol(LCD_I2C_ADDRESS, 0x00, command);
// ウエイト
// データシートではウエイト時間は26.3us以上になっているが、
// それより長くしないと初期化できないケースがあるため1msのウエイトを入れる
__delay_ms(1);
return;
}
//
// ディスプレイ消去
//
void lcdClearDisplay(void){
lcdSendCommandData(0x01);
return;
}
//
// カーソル位置移動
// 引数は水平方向右側プラスのX軸、垂直方向下側プラスのY軸で、それぞれ0から開始
// 左上の座標が(x=0, y=0)
//
void lcdLocateCursor(uint8_t position_x, uint8_t position_y){
// 文字表示位置指定コマンド送信
lcdSendCommandData( 0x80 + 0x40 * position_y + position_x );
return;
}
//
// 文字列を送信
//
void lcdSendString(char *str){
// strの文字列を*strが0になるまでLCDモジュールに送信
while(*str) {
lcdSendCharacterData(*str);
str++;
}
return;
}
//
// LCDモジュール初期化
//
void lcdInitialize(void){
// 初期化コマンド送信
lcdSendCommandData(0x38); // 2行モードに設定
lcdSendCommandData(0x39); // 拡張コマンド選択
lcdSendCommandData(0x14); // 内部クロック周波数設定
lcdSendCommandData(0x70); // コントラスト設定(C3:C0 = 0b0000に設定)
lcdSendCommandData(0x56); // 電源電圧が3.3VなのでBooster=ON、コントラスト設定(C5:C4 = 0b10に設定)
lcdSendCommandData(0x6c); // オペアンプのゲイン設定
// モジュール内電源安定化のための時間待ち
__delay_ms(200);
// 初期化コマンド続き
lcdSendCommandData(0x38); // 通常コマンド選択
lcdSendCommandData(0x01); // ディスプレイ表示内容クリア
lcdSendCommandData(0x0c); // ディスプレイ表示
return;
}
//
// I2Cプロトコル制御関数
//
// スタートコンディション生成
void i2cProtocolStart() {
// SSP1CON2レジスタのSENビットを1に設定すると
// スタートコンディションが生成される
// 発行が完了するとSSP1IFが1になるのでwhile文で待つ
SSP1IF = 0;
SSP1CON2bits.SEN = 1;
while (SSP1IF == 0) {}
SSP1IF = 0;
return;
}
// ストップコンディション生成
void i2cProtocolStop() {
// SSP1CON2レジスタのPENビットを1に設定すると
// ストップコンディションが生成される
// 発行が完了するとSSP1IFが1になるのでwhile文で待つ
SSP1IF = 0;
SSP1CON2bits.PEN = 1;
while (SSP1IF == 0) {}
SSP1IF = 0;
return;
}
// 1バイトデータ送信
void i2cProtocolSendData(uint8_t data) {
// SSP1BUFに送信したいデータをセットすると、そのデータが送信される
// 発行が完了するとSSP1IFが1になるのでwhile文で待つ
SSP1IF = 0;
SSP1BUF = data;
while (SSP1IF == 0) {}
SSP1IF = 0;
return;
}
// Ack/Nackチェック
uint8_t i2cProtocolCheckAck() {
uint8_t ackStatus;
if (SSP1CON2bits.ACKSTAT) {
ackStatus = I2C_NACK;
} else {
ackStatus = I2C_ACK;
}
return ackStatus;
}
//
// BME280初期化関数
//
void bme280Initialization(void) {
// 動作パラメータ設定
uint8_t t_sb = 0; // スタンドバイ時間は使用しない
uint8_t filter = 0; // フィルタOFF
uint8_t spi3w_en = 0; // SPIは4線式(=0)
uint8_t osrs_t = 1; // 温度オーバーサンプリング x1
uint8_t osrs_p = 1; // 大気圧オーバーサンプリング x1
uint8_t osrs_h = 1; // 湿度オーバーサンプリング x1
uint8_t mode = 0; // スリープモード
// 設定値をフォーマットに合わせる
uint8_t ctrl_meas_reg = (osrs_t << 5) | (osrs_p << 2) | mode;
uint8_t config_reg = (t_sb << 5) | (filter << 2) | spi3w_en;
uint8_t ctrl_hum_reg = osrs_h;
// BME280動作パラメータ書き込み
spiWrite1ByteData(0xF2, ctrl_hum_reg);
spiWrite1ByteData(0xF4, ctrl_meas_reg);
spiWrite1ByteData(0xF5, config_reg);
// センサ処理待ち
__delay_ms(1000);
// 補正値読み込み
// センサごとに固定ちのため、初期化時のみ読み込む
bme280ReadTrimmingParameters();
}
//
// 温湿度・気圧データ測定指示
//
void bme280ForcedMeasurement(void) {
// 動作パラメータ設定
uint8_t t_sb = 0; // スタンドバイ時間は使用しない
uint8_t filter = 0; // フィルタOFF
uint8_t spi3w_en = 0; // SPIは4線式
uint8_t osrs_t = 1; // 温度オーバーサンプリング x1
uint8_t osrs_p = 1; // 大気圧オーバーサンプリング x1
uint8_t osrs_h = 1; // 湿度オーバーサンプリング x1
uint8_t mode = 1; // 測定指示(1回測定したらスリープモードに移行)
// 設定値をフォーマットに合わせる
uint8_t ctrl_meas_reg = (osrs_t << 5) | (osrs_p << 2) | mode;
uint8_t config_reg = (t_sb << 5) | (filter << 2) | spi3w_en;
uint8_t ctrl_hum_reg = osrs_h;
// BME280動作パラメータ書き込み
spiWrite1ByteData(0xF2, ctrl_hum_reg);
spiWrite1ByteData(0xF4, ctrl_meas_reg);
spiWrite1ByteData(0xF5, config_reg);
// この段階でBME280の温湿度大気圧レジスタに測定値が格納されている
// このあとスリープモードに入が、温湿度・気圧データの読み取りは可能
}
//
// 補正データ読み込み
//
void bme280ReadTrimmingParameters(void) {
// 気温データ用補正データ
dig_T1 = spiRead2BytesData(0x88);
dig_T2 = (int16_t)spiRead2BytesData(0x8A);
dig_T3 = (int16_t)spiRead2BytesData(0x8C);
// 気圧データ用補正データ用補正データ
dig_P1 = spiRead2BytesData(0x8E);
dig_P2 = (int16_t)spiRead2BytesData(0x90);
dig_P3 = (int16_t)spiRead2BytesData(0x92);
dig_P4 = (int16_t)spiRead2BytesData(0x94);
dig_P5 = (int16_t)spiRead2BytesData(0x96);
dig_P6 = (int16_t)spiRead2BytesData(0x98);
dig_P7 = (int16_t)spiRead2BytesData(0x9A);
dig_P8 = (int16_t)spiRead2BytesData(0x9C);
dig_P9 = (int16_t)spiRead2BytesData(0x9E);
// 湿度データ用補正データ用補正データ
dig_H1 = spiRead1ByteData(0xA1);
dig_H2 = (int16_t)spiRead2BytesData(0xE1);
dig_H3 = spiRead1ByteData(0xE3);
dig_H4 = (int16_t)((spiRead1ByteData(0xE4) << 4) | (spiRead1ByteData(0xE5) & 0x0F));
dig_H5 = (int16_t)((spiRead1ByteData(0xE6) << 4) | (spiRead1ByteData(0xE5) >> 4));
dig_H6 = (int8_t)spiRead1ByteData(0xE7);
}
//
// 補正前の生の温湿度・気圧データ読み込み
//
void bme280ReadMeasuredRawData() {
// データ読み取り用配列
uint32_t data[8];
// チップセレクトアクティブ
SPI_CSB = 0;
// 読み込み開始アドレス指定
spiSend8bit(0xF7 | 0b10000000);
// 8バイト分のデータ読み込み
for(int8_t i=0; i<8; i++){
data[i] = spiReceive8bit();
}
// チップセレクトインアクティブ
SPI_CSB = 0;
// 読み込みしたデータから気温、湿度、気圧データを生成
pres_raw = (data[0] << 12) | (data[1] << 4) | (data[2] >> 4);
temp_raw = (data[3] << 12) | (data[4] << 4) | (data[5] >> 4);
hum_raw = (data[6] << 8) | data[7];
}
//
// 気温データ補正
// 何をしているのかよくわからない
//
int32_t bme280CompensateTemperature() {
int32_t var1, var2, T;
var1 = ((((temp_raw >> 3) - ((int32_t)dig_T1<<1))) * ((int32_t)dig_T2)) >> 11;
var2 = (((((temp_raw >> 4) - ((int32_t)dig_T1)) * ((temp_raw>>4) - ((int32_t)dig_T1))) >> 12) * ((int32_t)dig_T3)) >> 14;
t_fine = var1 + var2;
T = (t_fine * 5 + 128) >> 8;
return T;
}
//
// 気圧データ補正
// 何をしているのかよくわからない
//
uint32_t bme280CompensatePressure() {
int32_t var1, var2;
uint32_t P;
var1 = (((int32_t)t_fine)>>1) - (int32_t)64000;
var2 = (((var1>>2) * (var1>>2)) >> 11) * ((int32_t)dig_P6);
var2 = var2 + ((var1*((int32_t)dig_P5))<<1);
var2 = (var2>>2)+(((int32_t)dig_P4)<<16);
var1 = (((dig_P3 * (((var1>>2)*(var1>>2)) >> 13)) >>3) + ((((int32_t)dig_P2) * var1)>>1))>>18;
var1 = ((((32768+var1))*((int32_t)dig_P1))>>15);
if (var1 == 0)
return 0;
P = (((uint32_t)(((int32_t)1048576)-pres_raw)-(var2>>12)))*3125;
if(P<0x80000000)
P = (P << 1) / ((uint32_t) var1);
else
P = (P / (uint32_t)var1) * 2;
var1 = (((int32_t)dig_P9) * ((int32_t)(((P>>3) * (P>>3))>>13)))>>12;
var2 = (((int32_t)(P>>2)) * ((int32_t)dig_P8))>>13;
P = (uint32_t)((int32_t)P + ((var1 + var2 + dig_P7) >> 4));
return P;
}
//
// 湿度データ補正
// 何をしているのかよくわからない
//
uint32_t bme280CompensateHumidity() {
int32_t v_x1_u32r;
v_x1_u32r = (t_fine - ((int32_t)76800));
v_x1_u32r = (((((hum_raw << 14) -(((int32_t)dig_H4) << 20) - (((int32_t)dig_H5) * v_x1_u32r)) +
((int32_t)16384)) >> 15) * (((((((v_x1_u32r * ((int32_t)dig_H6)) >> 10) *
(((v_x1_u32r * ((int32_t)dig_H3)) >> 11) + ((int32_t) 32768))) >> 10) + ((int32_t)2097152)) *
((int32_t) dig_H2) + 8192) >> 14));
v_x1_u32r = (v_x1_u32r - (((((v_x1_u32r >> 15) * (v_x1_u32r >> 15)) >> 7) * ((int32_t)dig_H1)) >> 4));
// v_x1_u32r = (v_x1_u32r < 0 ? 0 : v_x1_u32r);
if( v_x1_u32r < 0 ){
v_x1_u32r = 0;
}
// v_x1_u32r = (v_x1_u32r > 419430400 ? 419430400 : v_x1_u32r);
if( v_x1_u32r > 419430400 ) {
v_x1_u32r = 419430400;
}
return (uint32_t)(v_x1_u32r >> 12);
}
//
// SPIデータを指定アドレスから2バイト読み込み
//
uint16_t spiRead2BytesData(uint8_t address) {
uint8_t data_low, data_high; // 読み込んだ1バイトデータ格納用
uint16_t data; // 2バイトデータ用
// チップセレクトを0にしてセンサモジュールとの通信開始
SPI_CSB = 0;
// 読み込みデータアドレス指定
spiSend8bit(address);
// 指定アドレスとその次のアドレスのデータを2バイト読み込み
data_low = spiReceive8bit();
data_high = spiReceive8bit();
//16ビットデータにする
data = (data_high << 8) | data_low;
// チップセレクトを1にして通信終了
SPI_CSB = 1;
return data;
}
//
// SPIデータを指定アドレスから1バイト読み込み
//
uint8_t spiRead1ByteData(uint8_t address) {
// 受信データ格納変数
uint8_t data;
// チップセレクトを0にしてセンサモジュールとの通信開始
SPI_CSB = 0;
// SPI通信手順によりアドレスを送信
spiSend8bit(address);
// SPI通信手順によりデータを受信
data = spiReceive8bit();
// チップセレクトを1にして通信終了
SPI_CSB = 1;
// 受信したーデータを返す
return data;
}
//
// SPIデータを指定アドレスに1バイト書き込み
//
void spiWrite1ByteData(uint8_t address, uint8_t data) {
// チップセレクトを0にしてセンサモジュールとの通信開始
SPI_CSB = 0;
// アドレス指定(書き込みは最上位ビット0)
spiSend8bit(address & 0b01111111);
// データ書き込み
spiSend8bit(data);
// チップセレクトを1にして通信終了
SPI_CSB = 1;
}
//
// SPIデータ8ビット書き込み
// SCK/MOSI制御のための関数であるため
// チップセレクト信号はこの関数の前後で制御すること
void spiSend8bit(uint8_t data) {
// 8ビット分繰り返す
for (int8_t i=7; i>=0; i--) {
// (1)クロックを0にする
SPI_SCK = 0;
// (2)MOSIにデータをセットする
if( data & (1<<i) ) {
SPI_MOSI = 1;
} else {
SPI_MOSI = 0;
}
// (3)クロックを1にする
SPI_SCK = 1;
}
}
//
// SPIデータ8ビット読み込み
// SCK/MOSI制御のための関数であるため
// チップセレクト信号はこの関数の前後で制御すること
//
uint8_t spiReceive8bit() {
// 受信データ格納変数
uint8_t read_data = 0;
// 8ビット分繰り返す
for (int8_t i=7; i>=0; i--) {
// 受信データ変数を1ビット左シフト
read_data <<= 1;
// (1)クロックを0にする
SPI_SCK = 0;
// (2)クロックを1にする
SPI_SCK = 1;
// (3)この時点でセンサからのデータを読めるので、MISOのピン状態を読む
if(SPI_MISO){
read_data |= 1;
}
}
// 受信したデータを返す
return read_data;
}
更新履歴
| 日付 | 内容 |
|---|---|
| 2018.7.29 | 新規投稿 |
| 2019.5.14 | BME280の強制測定モードの際、測定が完了するまで待つ処理(10ms)を追加 |
| 2025.8.17 | プログラムのputchの引数をchar型に変更(XC8 Version 3対応) |
続き
PICマイコンとHX711を接続し、ADコンバータの値を読み込んでいます。
その値はunsigned long AD_conの型に代入し、その値をdouble AD_converの型に代入(キャスト)して、printf(“%f”,AD_conver);でLCDに表示させようと試みております。
ご質問どうもありがとうございます。
printfがコンパイルエラーの原因となっているようですが、
具体的にどのようなエラーが出ているか、
エラーログを教えていただくことはできますでしょうか。
なお、エラーログにはディレクトリパスが入っていて、
その中にユーザ名も入っていますので、
エラーの部分のみのログで構いませせん。
不明点ありましたらお手数ですが再度コメントいただければと思います。
お世話になります。
ログをお送りします。
printf の変換指定子 ”%lu”,”%d”などは問題なく使えるのですが、”%f”にかえると駄目です。※表示する変数の型も変換指定子によって変更しています。
————————————以下ログ————————————
make -f nbproject/Makefile-default.mk SUBPROJECTS= .build-conf
make -f nbproject/Makefile-default.mk dist/default/debug/PIC16F1827_LCD1602_HX711.X.debug.elf
make[2]: Entering directory ‘C:/Users/***/MPLABXProjects/PIC16F1827_LCD1602_HX711.X’
“C:\Program Files\Microchip\xc8\v2.46\bin\xc8-cc.exe” -mcpu=16F1827 -c -D__DEBUG=1 -mdebugger=none -mdfp=”C:/Program Files/Microchip/MPLABX/v6.20/packs/Microchip/PIC12-16F1xxx_DFP/1.7.242/xc8″ -fno-short-double -fno-short-float -O0 -fasmfile -maddrqual=ignore -xassembler-with-cpp -mwarn=-3 -Wa,-a -DXPRJ_default=default -msummary=-psect,-class,+mem,-hex,-file -ginhx32 -Wl,–data-init -mno-keep-startup -mno-osccal -mno-resetbits -mno-save-resetbits -mno-download -mno-stackcall -mno-default-config-bits -std=c99 -gdwarf-3 -mstack=compiled:auto:auto -o build/default/debug/LCD.p1 LCD.c
make[2]: Leaving directory ‘C:/Users/***/MPLABXProjects/PIC16F1827_LCD1602_HX711.X’
make[2]: Entering directory ‘C:/Users/***/MPLABXProjects/PIC16F1827_LCD1602_HX711.X’
“C:\Program Files\Microchip\xc8\v2.46\bin\xc8-cc.exe” -mcpu=16F1827 -Wl,-Map=dist/default/debug/PIC16F1827_LCD1602_HX711.X.debug.map -D__DEBUG=1 -mdebugger=none -DXPRJ_default=default -Wl,–defsym=__MPLAB_BUILD=1 -mdfp=”C:/Program Files/Microchip/MPLABX/v6.20/packs/Microchip/PIC12-16F1xxx_DFP/1.7.242/xc8″ -fno-short-double -fno-short-float -O0 -fasmfile -maddrqual=ignore -xassembler-with-cpp -mwarn=-3 -Wa,-a -msummary=-psect,-class,+mem,-hex,-file -ginhx32 -Wl,–data-init -mno-keep-startup -mno-osccal -mno-resetbits -mno-save-resetbits -mno-download -mno-stackcall -mno-default-config-bits -std=c99 -gdwarf-3 -mstack=compiled:auto:auto -Wl,–memorysummary,dist/default/debug/memoryfile.xml -o dist/default/debug/PIC16F1827_LCD1602_HX711.X.debug.elf build/default/debug/main.p1 build/default/debug/LCD.p1 build/default/debug/loadcell.p1
::: error: (1347) can’t find 0x99 words (0x99 withtotal) for psect “maintext” in class “CODE” (largest unused contiguous range 0x5D)
Non line specific message::: advisory: (1493) updated 32-bit floating-point routines might trigger “can’t find space” messages appearing after updating to this release; consider using the smaller 24-bit floating-point types
::: error: (1347) can’t find 0x8B words (0x8b withtotal) for psect “text21” in class “CODE” (largest unused contiguous range 0x5D)
::: error: (1347) can’t find 0x7F words (0x7f withtotal) for psect “text14” in class “CODE” (largest unused contiguous range 0x5D)
::: error: (1347) can’t find 0x70 words (0x70 withtotal) for psect “text15” in class “CODE” (largest unused contiguous range 0x5D)
::: error: (1347) can’t find 0x5F words (0x5f withtotal) for psect “text8” in class “CODE” (largest unused contiguous range 0x5D)
::: error: (1347) can’t find 0x4E words (0x4e withtotal) for psect “text22” in class “CODE” (largest unused contiguous range 0x23)
::: error: (1347) can’t find 0x47 words (0x47 withtotal) for psect “text30” in class “CODE” (largest unused contiguous range 0x23)
::: error: (1347) can’t find 0x33 words (0x33 withtotal) for psect “text6” in class “CODE” (largest unused contiguous range 0x23)
::: error: (1347) can’t find 0x2D words (0x2d withtotal) for psect “text24” in class “CODE” (largest unused contiguous range 0x23)
::: error: (1347) can’t find 0x27 words (0x27 withtotal) for psect “text7” in class “CODE” (largest unused contiguous range 0x23)
::: error: (1347) can’t find 0x27 words (0x27 withtotal) for psect “text11” in class “CODE” (largest unused contiguous range 0x23)
::: error: (1347) can’t find 0x23 words (0x23 withtotal) for psect “text20” in class “CODE” (largest unused contiguous range 0x3)
::: error: (1347) can’t find 0x20 words (0x20 withtotal) for psect “text16” in class “CODE” (largest unused contiguous range 0x3)
::: error: (1347) can’t find 0x1B words (0x1b withtotal) for psect “text5” in class “CODE” (largest unused contiguous range 0x3)
::: error: (1347) can’t find 0x15 words (0x15 withtotal) for psect “text12” in class “CODE” (largest unused contiguous range 0x3)
::: error: (1347) can’t find 0x14 words (0x14 withtotal) for psect “text26” in class “CODE” (largest unused contiguous range 0x3)
::: error: (1347) can’t find 0x11 words (0x11 withtotal) for psect “text1” in class “CODE” (largest unused contiguous range 0x3)
::: error: (1347) can’t find 0xF words (0xf withtotal) for psect “text23” in class “CODE” (largest unused contiguous range 0x3)
::: error: (1347) can’t find 0xE words (0xe withtotal) for psect “text10” in class “CODE” (largest unused contiguous range 0x3)
::: error: (1347) can’t find 0xD words (0xd withtotal) for psect “stringtext1” in class “STRCODE” (largest unused contiguous range 0x3)
::: error: (1347) can’t find 0xD words (0xd withtotal) for psect “text25” in class “CODE” (largest unused contiguous range 0x3)
::: error: (1347) can’t find 0xD words (0xd withtotal) for psect “text27” in class “CODE” (largest unused contiguous range 0x3)
::: error: (1347) can’t find 0xB words (0xb withtotal) for psect “text18” in class “CODE” (largest unused contiguous range 0x3)
::: error: (1347) can’t find 0xB words (0xb withtotal) for psect “text28” in class “CODE” (largest unused contiguous range 0x3)
::: error: (1347) can’t find 0xB words (0xb withtotal) for psect “text29” in class “CODE” (largest unused contiguous range 0x3)
::: error: (1347) can’t find 0x6 words (0x6 withtotal) for psect “clrtext” in class “CODE” (largest unused contiguous range 0x3)
::: error: (1347) can’t find 0x6 words (0x6 withtotal) for psect “text9” in class “CODE” (largest unused contiguous range 0x3)
::: error: (1347) can’t find 0x4 words (0x4 withtotal) for psect “stringtext2” in class “STRCODE” (largest unused contiguous range 0x3)
::: error: (1347) can’t find 0x4 words (0x4 withtotal) for psect “stringtext3” in class “STRCODE” (largest unused contiguous range 0x3)
(908) exit status = 1
make[2]: Leaving directory ‘C://MPLABXProjects/PIC16F1827_LCD1602_HX711.X’
make[2]: *** [nbproject/Makefile-default.mk:159: dist/default/debug/PIC16F1827_LCD1602_HX711.X.debug.elf] Error 1
make[1]: *** [nbproject/Makefile-default.mk:85: .build-conf] Error 2
make: *** [nbproject/Makefile-impl.mk:39: .build-impl] Error 2
BUILD FAILED (exit value 2, total time: 2s)
Use the Compiler Advisor to compare and explore recommended Compiler Options to optimize memory usage.
Launch Compiler Advisor
エラーログどうもありがとうございました。
結論としては、メモリ不足が原因と思われます。
32ビット浮動小数点の場合、最近のXC8ではメモリがかなり使われているようです。
エラーログを見ると、ビルドオプションとして
-fno-short-double -fno-short-float
が指定されています。この場合、浮動小数点は32ビットとなります。
XC8のコンパイルオプションで浮動小数点を24ビットに変更できますので、以下の手順で変更して再度ビルドを試していただけますでしょうか。
以下の手順でも解決しない場合、基本的にはメモリ容量の大きいPICマイコンに変更するのが手っ取り早いと思います。
1) プロジェクトの「Properties」を開く
2) Categoriesから「XC8 Global Options」 ▶︎ 「XC8 Linker」を選択
3) 右側領域のオプション設定画面、上にあるメニューから「Memory Model」を選択
4) 「Size of double」と「Size of float」を24 bitに変更
5) OKボタンでクローズ、再度ビルド
ご参考に設定画面のスクショを添付します。
お世話になっております。
ご教示いただいた内容で24bitに変更して再度ビルドしましたが、
「BUILD FAILED]となりました。
メモリの大きいマイコンに変更して試してみたいと思います。
ありがとうございました。
再度ビルドした時のログです。コメントいただければ幸いです。
::: error: (2047) 24-bit floating point types are not supported when compiling in C99
エラー: (2047) C99 でコンパイルする場合、24 ビット浮動小数点型はサポートされません
PIC16F1827では駄目なのでしょうか。
————————————以下ログ————————————
make -f nbproject/Makefile-default.mk SUBPROJECTS= .build-conf
make -f nbproject/Makefile-default.mk dist/default/debug/PIC16F1827_LCD1602_HX711.X.debug.elf
make[2]: *** [nbproject/Makefile-default.mk:111: build/default/debug/loadcell.p1] Error 1
make[2]: *** Waiting for unfinished jobs….
make[2]: *** [nbproject/Makefile-default.mk:95: build/default/debug/main.p1] Error 1
make[2]: *** [nbproject/Makefile-default.mk:103: build/default/debug/LCD.p1] Error 1
make[1]: *** [nbproject/Makefile-default.mk:85: .build-conf] Error 2
make[2]: Entering directory ‘C:/Users/***/MPLABXProjects/PIC16F1827_LCD1602_HX711.X’
“C:\Program Files\Microchip\xc8\v2.46\bin\xc8-cc.exe” -mcpu=16F1827 -c -D__DEBUG=1 -mdebugger=none -mdfp=”C:/Program Files/Microchip/MPLABX/v6.20/packs/Microchip/PIC12-16F1xxx_DFP/1.7.242/xc8″ -fshort-double -fshort-float -O0 -fasmfile -maddrqual=ignore -xassembler-with-cpp -mwarn=-3 -Wa,-a -DXPRJ_default=default -msummary=-psect,-class,+mem,-hex,-file -ginhx32 -Wl,–data-init -mno-keep-startup -mno-osccal -mno-resetbits -mno-save-resetbits -mno-download -mno-stackcall -mno-default-config-bits -std=c99 -gdwarf-3 -mstack=compiled:auto:auto -o build/default/debug/loadcell.p1 loadcell.c
make: *** [nbproject/Makefile-impl.mk:39: .build-impl] Error 2
::: error: (2047) 24-bit floating point types are not supported when compiling in C99
(908) exit status = 1
make[2]: Leaving directory ‘C:/Users/***/MPLABXProjects/PIC16F1827_LCD1602_HX711.X’
make[2]: Entering directory ‘C:/Users/***/MPLABXProjects/PIC16F1827_LCD1602_HX711.X’
“C:\Program Files\Microchip\xc8\v2.46\bin\xc8-cc.exe” -mcpu=16F1827 -c -D__DEBUG=1 -mdebugger=none -mdfp=”C:/Program Files/Microchip/MPLABX/v6.20/packs/Microchip/PIC12-16F1xxx_DFP/1.7.242/xc8″ -fshort-double -fshort-float -O0 -fasmfile -maddrqual=ignore -xassembler-with-cpp -mwarn=-3 -Wa,-a -DXPRJ_default=default -msummary=-psect,-class,+mem,-hex,-file -ginhx32 -Wl,–data-init -mno-keep-startup -mno-osccal -mno-resetbits -mno-save-resetbits -mno-download -mno-stackcall -mno-default-config-bits -std=c99 -gdwarf-3 -mstack=compiled:auto:auto -o build/default/debug/main.p1 main.c
::: error: (2047) 24-bit floating point types are not supported when compiling in C99
(908) exit status = 1
make[2]: Leaving directory ‘C:/Users/***/MPLABXProjects/PIC16F1827_LCD1602_HX711.X’
make[2]: Entering directory ‘C:/Users/***/MPLABXProjects/PIC16F1827_LCD1602_HX711.X’
“C:\Program Files\Microchip\xc8\v2.46\bin\xc8-cc.exe” -mcpu=16F1827 -c -D__DEBUG=1 -mdebugger=none -mdfp=”C:/Program Files/Microchip/MPLABX/v6.20/packs/Microchip/PIC12-16F1xxx_DFP/1.7.242/xc8″ -fshort-double -fshort-float -O0 -fasmfile -maddrqual=ignore -xassembler-with-cpp -mwarn=-3 -Wa,-a -DXPRJ_default=default -msummary=-psect,-class,+mem,-hex,-file -ginhx32 -Wl,–data-init -mno-keep-startup -mno-osccal -mno-resetbits -mno-save-resetbits -mno-download -mno-stackcall -mno-default-config-bits -std=c99 -gdwarf-3 -mstack=compiled:auto:auto -o build/default/debug/LCD.p1 LCD.c
::: error: (2047) 24-bit floating point types are not supported when compiling in C99
(908) exit status = 1
make[2]: Leaving directory ‘C:/Users/***/MPLABXProjects/PIC16F1827_LCD1602_HX711.X’
BUILD FAILED (exit value 2, total time: 309ms)
早速のご確認どうもありがとうございます!
すみません!!
C99はダメなんですね。私の環境で大丈夫だったのですが、確認したらC90でした。
お手数ですが、コンパイラのバージョン変更も試していただけますでしょうか。次の手順になります。(設定画面のスクショ添付します)
1) プロジェクトの「Properties」を開く
2) Categoriesから「XC8 Global Options」を選択
3) 右側領域のオプション設定画面で、「C Standard」で「C90」を選択
4) OKボタンでクローズ、再度ビルド
私の環境ではこれでビルドが通りましたので、ビルド自体は通ると思います。ただ、メモリ容量は別問題ですので、お手数ですがビルド、書き込みができるかご確認いただければと思います。
お世話になります。
早速ご教示いただいた内容(C99→C90)で
再ビルドを確認しましたが、上手く行きませんでした。
下記の通りエラーが出ました。
advisory: (2099) legacy C90 library is deprecated and will be discontinued in a future release; consult the release notes for more details
advisory: (2095) legacy HI-TECH support is deprecated and will be discontinued in a future release; consult the release notes for more details
アドバイス: (2099) レガシー C90 ライブラリは非推奨であり、将来のリリースで廃止される予定です。詳細についてはリリース ノートを参照してください。
アドバイス: (2095) レガシー HI-TECH サポートは非推奨であり、将来のリリースで廃止される予定です。詳細についてはリリース ノートを参照してください。
対策について、ご教示いただければ幸いです。
————————————以下ログ————————————
make -f nbproject/Makefile-default.mk SUBPROJECTS= .build-conf
make -f nbproject/Makefile-default.mk dist/default/debug/PIC16F1827_LCD1602_HX711.X.debug.elf
make[2]: Entering directory ‘C:/Users/***/MPLABXProjects/PIC16F1827_LCD1602_HX711.X’
“C:\Program Files\Microchip\xc8\v2.46\bin\xc8-cc.exe” -mcpu=16F1827 -Wl,-Map=dist/default/debug/PIC16F1827_LCD1602_HX711.X.debug.map -D__DEBUG=1 -mdebugger=none -DXPRJ_default=default -Wl,–defsym=__MPLAB_BUILD=1 -mdfp=”C:/Program Files/Microchip/MPLABX/v6.20/packs/Microchip/PIC12-16F1xxx_DFP/1.7.242/xc8″ -fshort-double -fshort-float -O0 -fasmfile -maddrqual=ignore -xassembler-with-cpp -mwarn=-3 -Wa,-a -msummary=-psect,-class,+mem,-hex,-file -ginhx32 -Wl,–data-init -mno-keep-startup -mno-osccal -mno-resetbits -mno-save-resetbits -mno-download -mno-stackcall -mno-default-config-bits -std=c90 -gdwarf-3 -mstack=compiled:auto:auto -Wl,–memorysummary,dist/default/debug/memoryfile.xml -o dist/default/debug/PIC16F1827_LCD1602_HX711.X.debug.elf build/default/debug/main.p1 build/default/debug/LCD.p1 build/default/debug/loadcell.p1
advisory: (2099) legacy C90 library is deprecated and will be discontinued in a future release; consult the release notes for more details
advisory: (2095) legacy HI-TECH support is deprecated and will be discontinued in a future release; consult the release notes for more details
::: error: (1347) can’t find 0x4A words (0x4a withtotal) for psect “text14” in class “CODE” (largest unused contiguous range 0x47)
::: error: (1347) can’t find 0x3C words (0x3c withtotal) for psect “text10” in class “CODE” (largest unused contiguous range 0x4)
::: error: (1347) can’t find 0x38 words (0x38 withtotal) for psect “text19” in class “CODE” (largest unused contiguous range 0x4)
::: error: (1347) can’t find 0x35 words (0x35 withtotal) for psect “stringtext3” in class “STRCODE” (largest unused contiguous range 0x4)
::: error: (1347) can’t find 0x34 words (0x34 withtotal) for psect “text9” in class “CODE” (largest unused contiguous range 0x4)
::: error: (1347) can’t find 0x2D words (0x2d withtotal) for psect “text21” in class “CODE” (largest unused contiguous range 0x4)
::: error: (1347) can’t find 0x27 words (0x27 withtotal) for psect “stringtext1” in class “STRCODE” (largest unused contiguous range 0x4)
::: error: (1347) can’t find 0x27 words (0x27 withtotal) for psect “stringtext2” in class “STRCODE” (largest unused contiguous range 0x4)
::: error: (1347) can’t find 0x27 words (0x27 withtotal) for psect “text28” in class “CODE” (largest unused contiguous range 0x4)
::: error: (1347) can’t find 0x21 words (0x21 withtotal) for psect “text16” in class “CODE” (largest unused contiguous range 0x4)
::: error: (1347) can’t find 0x20 words (0x20 withtotal) for psect “text8” in class “CODE” (largest unused contiguous range 0x4)
::: error: (1347) can’t find 0x14 words (0x14 withtotal) for psect “text23” in class “CODE” (largest unused contiguous range 0x4)
::: error: (1347) can’t find 0xF words (0xf withtotal) for psect “text20” in class “CODE” (largest unused contiguous range 0x4)
::: error: (1347) can’t find 0xE words (0xe withtotal) for psect “text6” in class “CODE” (largest unused contiguous range 0x4)
::: error: (1347) can’t find 0xD words (0xd withtotal) for psect “text22” in class “CODE” (largest unused contiguous range 0x4)
::: error: (1347) can’t find 0xD words (0xd withtotal) for psect “text24” in class “CODE” (largest unused contiguous range 0x4)
::: error: (1347) can’t find 0xB words (0xb withtotal) for psect “text25” in class “CODE” (largest unused contiguous range 0x4)
::: error: (1347) can’t find 0xB words (0xb withtotal) for psect “text26” in class “CODE” (largest unused contiguous range 0x4)
::: error: (1347) can’t find 0xA words (0xa withtotal) for psect “text18” in class “CODE” (largest unused contiguous range 0x4)
::: error: (1347) can’t find 0x6 words (0x6 withtotal) for psect “clrtext” in class “CODE” (largest unused contiguous range 0x4)
::: error: (1347) can’t find 0x6 words (0x6 withtotal) for psect “text5” in class “CODE” (largest unused contiguous range 0x4)
(908) exit status = 1
make[2]: Leaving directory ‘C:/Users/***/MPLABXProjects/PIC16F1827_LCD1602_HX711.X’
make[2]: *** [nbproject/Makefile-default.mk:159: dist/default/debug/PIC16F1827_LCD1602_HX711.X.debug.elf] Error 1
make[1]: *** [nbproject/Makefile-default.mk:85: .build-conf] Error 2
make: *** [nbproject/Makefile-impl.mk:39: .build-impl] Error 2
BUILD FAILED (exit value 2, total time: 1s)
ダメなんですね…
エラーログを見ると、プログラムメモリが足りない件は引き続き発生していますね。
解決策としてはメモリ容量の大きいPICマイコンに変更するのが良いと思います。(XC8有償版で最適化する方法もありますが、そもそも有償ですし、最適化してもメモリが足りない可能性もあります…)
また、
advisory: (2099) legacy C90 library is deprecated and will be discontinued in a future release; consult the release notes for more details
この内容ですが、エラーではなく注意喚起です。C90で24ビット浮動小数点は将来的には使えなくなるようです。
お世話になっております。
色々とご回答いただきましてありがとうございます。
メモリ容量の大きいPICマイコンでチャレンジしてみます。
また、何かありましたら、ご教示いただけますようよろしくお願いいたします。
ありがとうございました。
お世話になっております。
いつもサイトで勉強させていただいてます。
I2C通信でAQM1602を動作させるときに、printf(”%f”、 変数名);
として表示させたいのですが、この命令分の先頭に「//」を付けると
コンパイルできるのですが、「//」を外すとコンパイルできません。
どのような原因が考えられるのでょうか。
ちなみにPICはPIC16F1827を使用しています。